Eulerian Path
历史
在 18 世纪初,普鲁士的哥尼斯堡(今日俄罗斯的加里宁格勒)被普列戈利亚河分成了南北两岸,河中心还有两座岛屿。岛屿与河的两岸由七座桥连接,如下图所示。
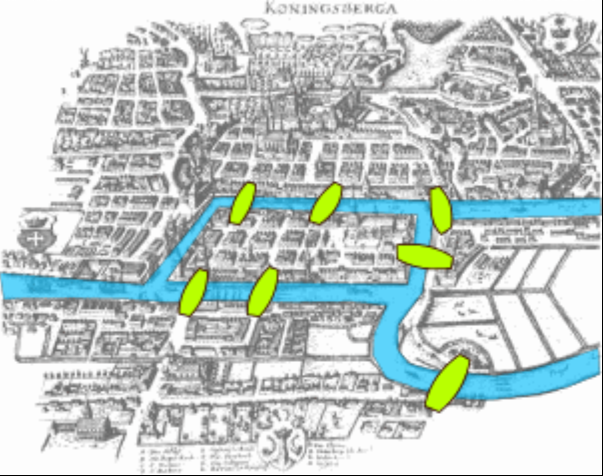
当时,当地居民在桥上散步的过程中,逐渐产生了一项有趣的消遣活动:找到一条从任意地点出发的路径,经过每座桥恰好一次,并回到出发点。
这个谜题看似简单,然而许多年过去了,都没有人找到符合要求的路径。1735 年,时年 28 岁的数学家欧拉也听说了这一问题。经过了一段时间的研究后,欧拉对该问题做出了分析。欧拉对哥尼斯堡七桥问题的分析更加抽象化。首先,欧拉将每片地区抽象为一个点,并将每座桥抽象为连接两点的一条线,得到如下抽象图形。同学们看这张图一定会觉得非常熟悉,事实上,欧拉对哥尼斯堡七桥问题的研究正是图论的开端。
定义
- 欧拉路径:指的是一条经过图中每一条边恰好一次的路径,但不要求必须回到起点。
- 欧拉回路:是指一条经过图中每一条边一次且仅一次,并且最终回到起点的路径。欧拉回路是欧拉路径的特殊情况。
- 欧拉图:存在欧拉回路的图称作欧拉图。
- 半欧拉图:存在欧拉路径但不存在欧拉回路的图称作半欧拉图。
存在条件
前提: 所有边都是联通的。
无向图
- 欧拉回路的充分必要存在条件:如果图中所有顶点的度数都是偶数,则存在欧拉回路。
- 欧拉路径的充分必要存在条件:如果图中恰好有两个奇度顶点,则存在欧拉路径,但路径的起点和终点必须是这两个奇度顶点。
有向图
- 欧拉回路的充分必要条件:所有顶点的出度和入度都相等。
- 欧拉路径的充分必要条件: 恰好有一个顶点的出度比入度大1,且恰好有一个顶点的入度比出度大1,其余所有顶点的入度和出度相等。
希尔霍尔策算法
基本思想是首先找到一个子回路,并逐步将其他回路合并到该子回路中,最终形成完整的欧拉回路。该证明被后人整理成 Hierholzer 算法,用于在已经判定无向图的欧拉回路存在的前提下,找出一条欧拉回路。算法流程如下:
寻找子回路:从任意非零度节点 u 出发,沿着边遍历图。在遍历过程中,删除经过的边。如果遇到一个所有边都被删除的节点,那么该节点必然是 u,即我们找到了一个包含 u 的回路。将该回路上的节点和边添加到结果序列中。
检查是否存在其它回路:检查刚刚添加到结果序列中的节点,看是否还有与节点相连,且未遍历的边。如果发现节点 u 有未遍历的边,则从 u 出发重复步骤 1,找到一个包含 u 的新回路,将结果序列中的一个 u 用这个新回路替换。此时结果序列仍然是一个回路,只不过变得更长了。
结束条件:重复步骤 2,直到所有边都被遍历。此时结果序列中的节点和边就构成了欧拉回路。算法结束。
求解回路
使用深度优先搜索,在函数退栈时保存路径。保存的路径的顺讯和搜索顺讯相反。
对于欧拉回路,从任一节点出发即可;对于欧拉路径,从路径起点开始搜索,搜索会在路径终点结束,然后回溯进行回路添加。
图解
 对于图示的结构,一次可能的搜索路径为
对于图示的结构,一次可能的搜索路径为
- 1 -> 2 -> 3 -> 4 回溯至2
- 1 -> (2 -> 5 -> 6 -> 7) -> 3 -> 4 (完整欧拉路径)
代码实现
根据 Acwing 模板题1184进行的综合实现代码
#include<bits/stdc++.h>
using namespace std;
const int N = 1e5+10 , M = 4e5+10;
/*
对于有向图 m 条边 会存储在 0 - m-1 这些 下标位置
对于无向图 2m 条边 会存储在 0 - 2m-1 这些 下表位置
对向边 存储在 诸如 (0 , 1) : 1 , (2 , 3) : 2 , (4 ,5) : 3 这些位置
*/
int h[N] , e[M] , ne[M] , idx;
int din[N] , dout[N];
int ans[M] , cnt;
int use[M];
int type;
void init()
{
memset(h , -1 , sizeof h);
}
void add(int a , int b)
{
e[idx] = b ; ne[idx] = h[a] ; h[a] = idx ++;
}
void dfs(int u)
{
// 使用引用直接改变邻接表表头 达到删除边的目的
for(int& i = h[u] ; i != -1 ; )
{
if(use[i])
{
i = ne[i];
continue;
}
use[i] = true;
if(type == 1) use[i ^ 1] = true;
// 将边的存储下表和自然下标做换算
int t;
if(type == 1)
{
t = i / 2 + 1;
if(i % 2 == 1) t = -t;
}
else t = i + 1;
int j = e[i];
i = ne[i];
dfs(j);
// 在退栈时记录路径上的边(或可选记录节点)
ans[ ++ cnt ] = t;
}
}
int main()
{
init();
cin >> type;
int n , m; cin >> n >> m;
for(int i = 0 ; i < m ; i++)
{
int a , b; scanf("%d %d" , &a , &b);
add(a , b);
if(type == 1) add(b , a);
din[b] ++ ; dout[a] ++;
}
// 判别无向图中欧拉回路存在的条件
if(type == 1)
{
for(int i = 1 ; i <= n ; i ++)
{
if( (din[i] + dout[i]) % 2 == 1)
{
cout << "NO";
return 0;
}
}
}
else // 判别有向图中欧拉回路存在的条件
{
for(int i = 1 ; i <= n ; i++)
{
if(din[i] != dout[i])
{
cout << "NO";
return 0;
}
}
}
// 找到一个有出边的节点 进行遍历
for(int i = 1 ; i <= n ; i++)
{
if(h[i] != -1)
{
dfs(i);
break;
}
}
// 一次遍历应该包含所有的边
if(cnt != m)
{
cout << "NO";
return 0;
}
cout << "YES" << endl;
for(int i = m ; i >= 1 ; i--) cout << ans[i] << " ";
}Copyright
Copyright Ownership:
License under:Attribution 4.0 International (CC-BY-4.0)